
こんにちは。星野です。
今日は機体の動作説明と機体の加工をしていこうと思います。
機体の動作イメージ
機体の上についているサーボモーターを制御し、機体が一定の方向を向くようにします。
カメラマウントのサーボモーターを制御し、映像がブレないようにします。
機体の加工
機体の真ん中あたりが大きな空洞になっています。
ロケット搭載時は筒状になっており、放出後にカメラマウントを自由に動かせるようにしようと思ったらこのような形になりました。
用意するもの
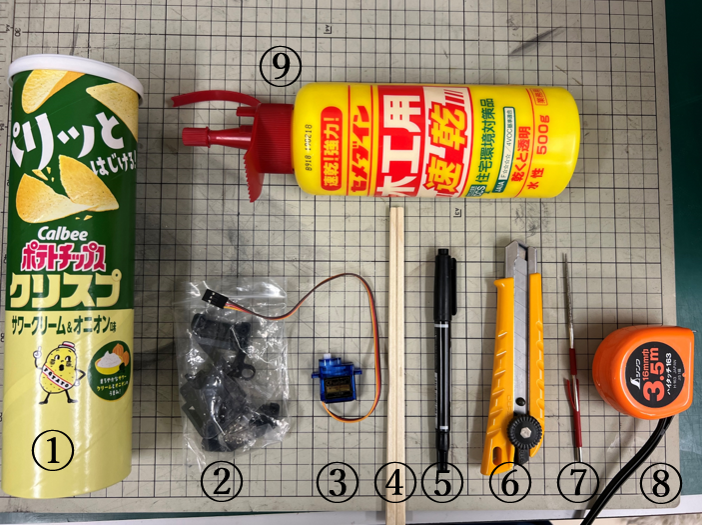
①ポテトチップスクリスプの箱
②サーボ用 2軸 カメラマウント
③サーボモーター
④割りばし
⑤油性ペン(ボールペンでも可)
⑥カッター
⑦きり
⑧メジャー
⑨木工用ボンド
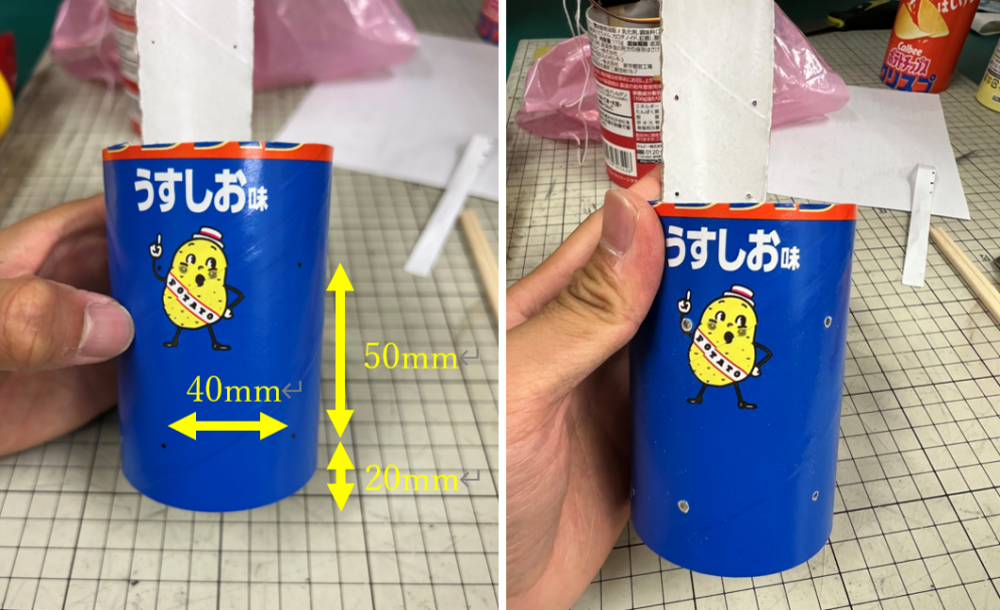
手順①
下図の寸法の位置に印をつけ、点線になっているところ切り取ります。

手順②
ポテトチップスの箱に割りばしを貼り付けます。
※箱の強度を強くするために割りばしで箱を補強します

手順③
カメラマウントを取り付ける位置に穴をあけます。
カメラマウントの部品をポテトチップスの箱にあてながら穴位置を調整し、穴をあけます。

手順④
下図の寸法の位置に穴をあけます。
マイコンを固定するために使用する穴です。
手順⑤
サーボモーターの白い部分がふたの真ん中にくるように置き、切り取ります。
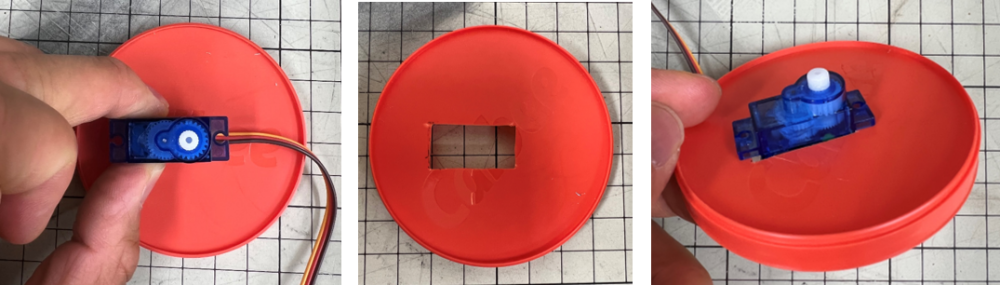
完成
今日はここまでです。
これで機体の大部分の加工は終了です。

おわりに
今日は機体の加工を行いました。
今日で機体の加工はほとんど終わったので、後は組み立てとプログラム作成がメインとなってきます。
次回はカメラマウントの組み立てとサーボモーターの動作確認を行う予定です。
次回の更新予定日は9/5です。お楽しみに!