
こんにちは。星野です。
今日は機体の駆動部分の組み立てをしていこうと思います。
本当は組み立てと動作確認を行う予定でしたが、ボリュームが多くなりそうなため、
組み立て、動作確認を分けて投稿することにしました。
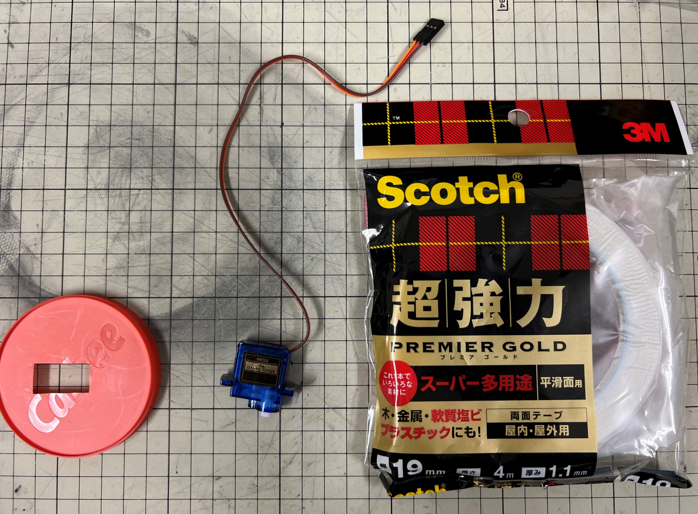
用意するもの

①前回加工したポテトチップスのふた
②サーボ用 2軸 カメラマウント
③サーボモーター ×3
④精密ドライバー
⑤ニッパー
⑥両面テープ
組み立て
カメラマウント組み立て
カメラマウントの組み立て方は、英語のサイトですがこちらが参考になりました。
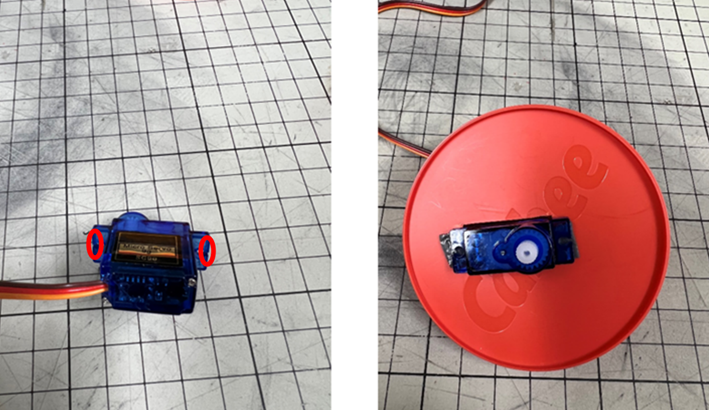
サーボモーター取り付け
・ポテトチップスのふた
・サーボモーター
・両面テープ
を用意します。
サーボモーターの左右の出っ張り部分(赤丸で囲っていることころ)に合わせて両面テープを貼り、
サーボモーターをポテトチップスのふたに取り付けます。
※サーボモーターの白色の回転軸がふたの真ん中にくるように固定します。
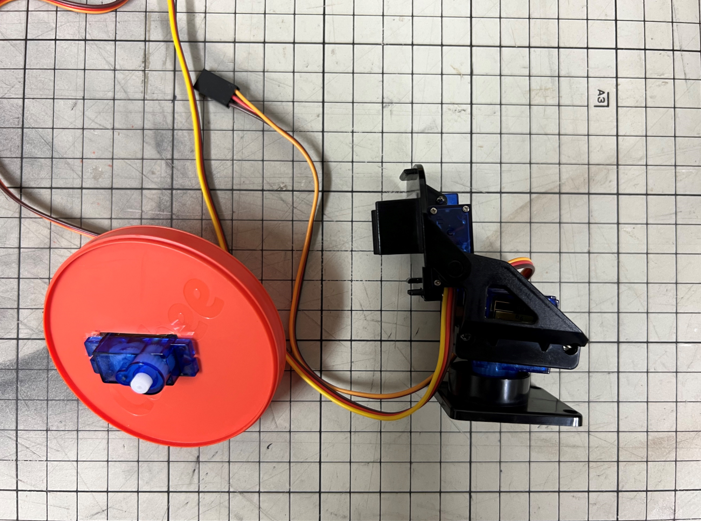
完成
おわりに
今日は駆動部分の組み立てを行いました。
次回は駆動部分の動作確認を行う予定です。
次回の更新予定日は9/12です。お楽しみに!