
銀賞 「 UTAT 」
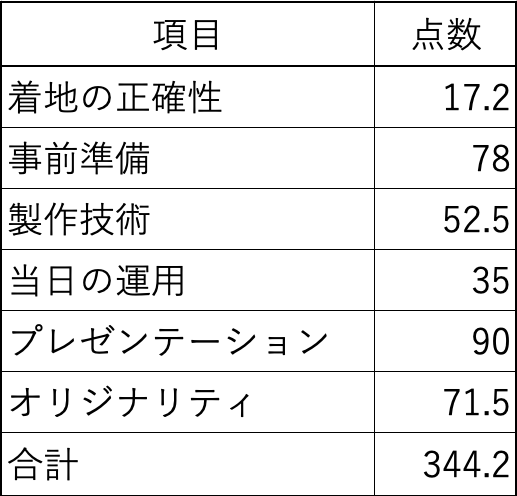
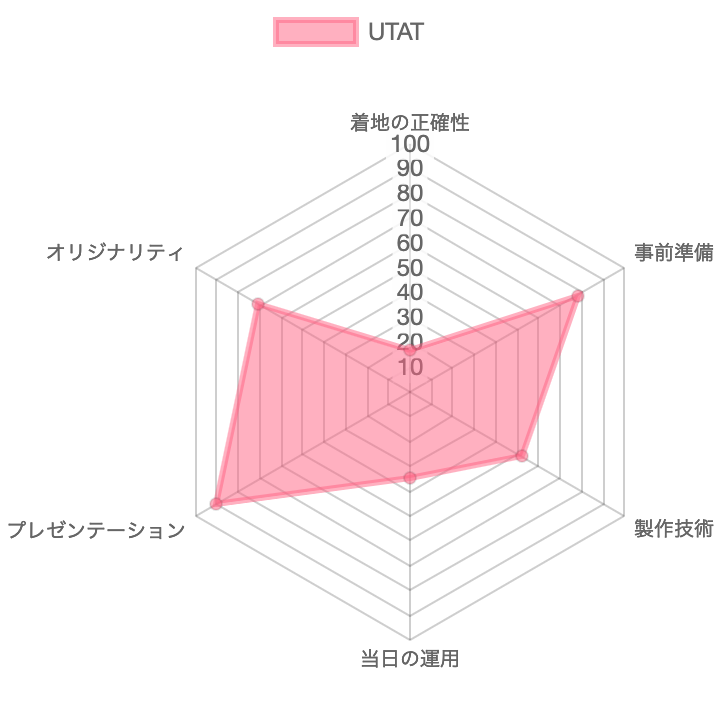
審査結果
事前プレゼン
投下の様子
事後プレゼン
審査員によるコメント
【北海道大学大学院教授 永田晴紀】
制御シーケンスを始めとして全体的によく練られ、作り込まれていると思います。実際に動かしてみると思わぬ不具合が出ることもありますし、ローバ方式は地上実験をミッチリ出来るのが大きなメリットですので、地上走行実験の結果も事前プレゼンに盛り込んで頂けると良かったと思います。特に、障害物に進路を塞がれた時に回り込む様子を見たかったです。着地判定に冗長判断が盛り込まれているのは良かったですが、タイマー起動の放出判定に冗長系が無かったのが残念でした。走行姿が見られず残念でした。壊れにくい構造で作るというのも重要ということですね。
【マツドサイエンティスト 野田篤司】
全体として、よくできています。
SEについて、「こうしたら良い」とは言いましたが、それはより上を目指すためで、現時点としては十分に良い出来です。実験を繰り返しているようで、とても良いことだと思います。
全チーム通じて、唯一パラシュートが正常に開いてますね。これで、モーターが動けば完全優勝だったのに・・・・・
モーターのように大電流でなおかつ、負荷によって大きく電流が変化し、場合によっては逆起電圧が発生するものに昇圧回路を使うことはトラブルのもとになります。
電源となる電池の電圧にあったモーターを選びなおすべきだったと思います。
【チーム岩井家 岩井竜哉
「想定している確認/実験事項」の考慮が素晴らしい。資料レベルでは一番良く考慮されていたと思います。限られた時間の中で色々と制約もあったと思いますが、よく纏めてきたなと関心しました。資料については実作業担当の植松電機さんの視点で考えるともう少し改善点が見えてくるかなと思います。個人的にはニクロム線によるナイロン線の溶断機能とローバーの自立制御が気になってます。ぜひ成功させて下さい。