
SPC2017
結果発表
2017/9/30(土)のスペースプローブコンテストにご参加頂いた皆様、本当にありがとうございました。
天候も不安定で、雨対策、風対策と当日に向けて対応しなければならないことが多かったことと思います。
今年は例年とは違った限定したミッションの中、様々な工夫を凝らしたチャレンジがあり、我々運営側としても非常に楽しく見ることができました。
また、初の一般参加もあり、高校生にとっても刺激になったのではないかと思います。来年もさらにより良い大会にしていきますので、どうぞよろしくお願いします。
受賞チーム発表
プローブ部門
最優秀賞
・北海道琴似工業高等学校チーム
金賞
・草野秀樹チーム
銀賞
・岩井竜哉チーム
・北海道札幌東高等学校チーム
・北海道富良野緑峰高等学校チーム
・立命館慶祥高等学校チーム
ロケット部門
優勝
樋郡翔一郎
準優勝
北海道滝川高等学校
プローブ部門
各チーム結果発表
全6チーム(高校4チーム、一般2チーム)が参加しました。
競技内容について、審査員3名で点数を付けその平均値を点数としています。
草野チーム
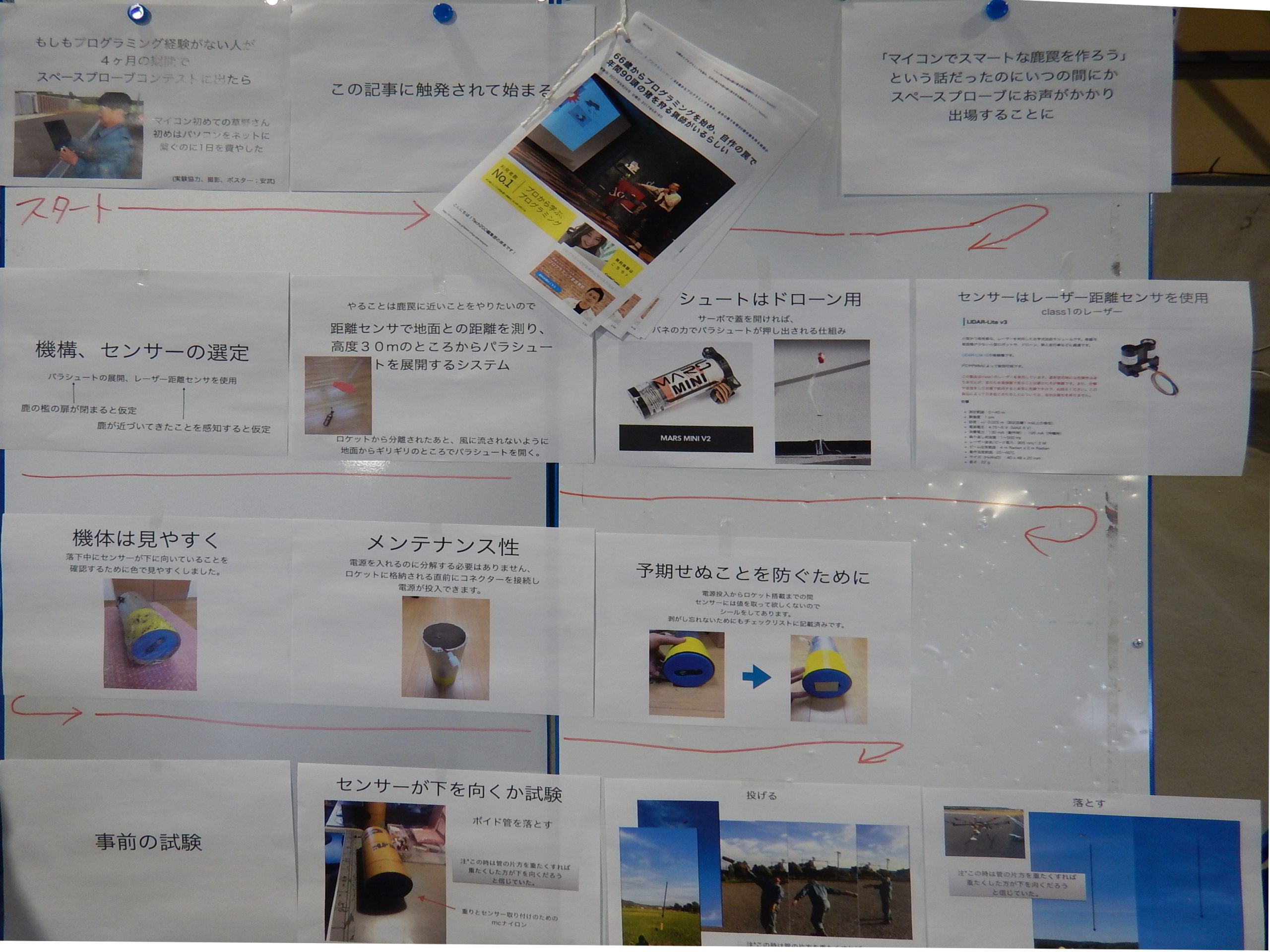
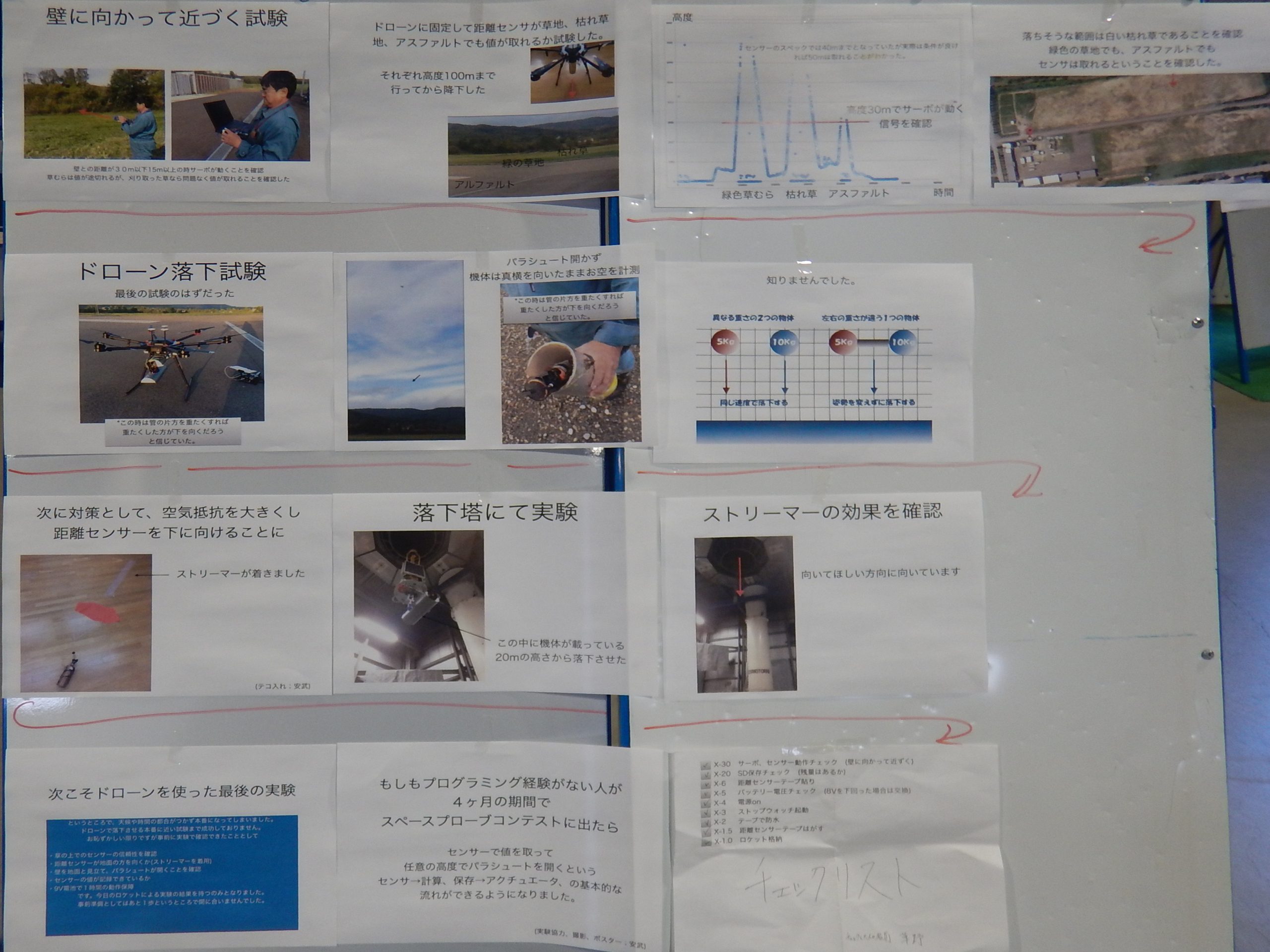
【期待する動作】
高度30mで、パラシュートを開きます。
- 地上約100mでロケットからプローブが放出される
- プローブはそのまま自由落下
- 高度30mでプローブからパラシュートを展開
- パラシュートでゆっくりと着地
詳細は以下の事前プレゼンテーション資料を参照ください。
kusano_jizen1
kusano_jizen2
【見どころ】
- 高度30mを検出し、パラシュートを開くことができるか(パラシュートが開かず、そのまま自由落下してしまう可能性あり)
- ターゲット着地への制御は行わないので、そこは運任せ(風向きから落下位置を参加者が予想して配置する、Bターゲット頼み)
【実施結果】
- 見事、地上約5mでパラシュートが開いた!
詳細は、以下のファイルを参照ください。
事前プレゼンテーション資料
事前プレゼンテーション資料
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 17.6 |
| 事前準備 | 31.2 |
| 制作技術 | 17.2 |
| 当日の運用 | 10.0 |
| プレゼンテーション | 10.0 |
| Aミッション | 18.3 |
| 合計 | 104.3 |
審査コメント
- 飛行をコントロールしないのは素晴らしい。(植松)
- とてもシンプルな設計コンセプトを、丁寧に実現されたと思います(永田)
- 実験の質と回数が経験の少なさを補ったように思います。参加高校生の手本になると思います(安中)
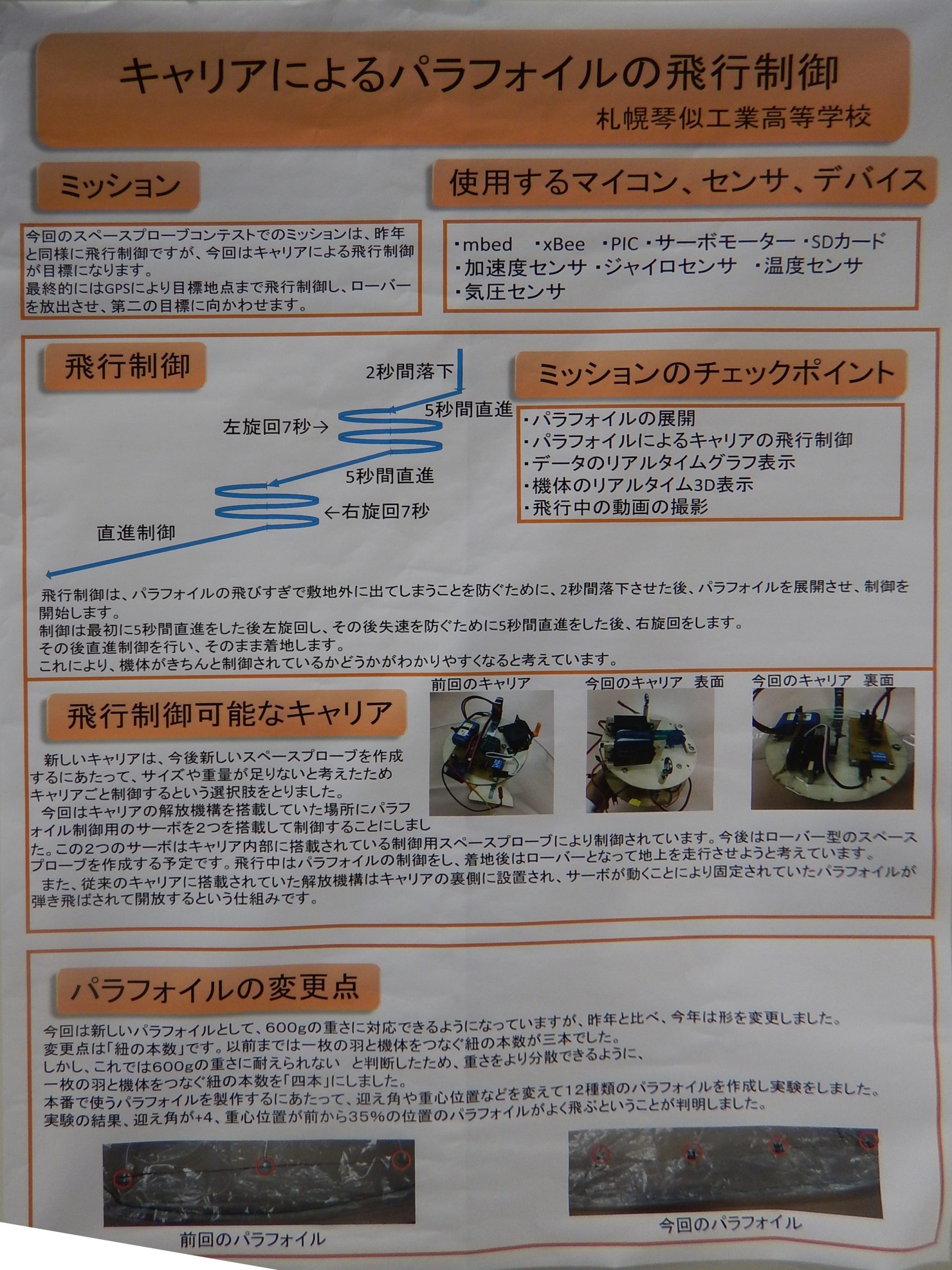
琴似工業高校チーム
【期待する動作】
パラフォイルで飛行制御をします。
- 地上約100mでロケットからプローブが放出される
- プローブはそのまま自由落下(2秒間)
- プローブからパラフォイルを展開
- 飛行制御をし、直進(5秒間)
- 飛行制御をし、左旋回(7秒間)
- 飛行制御をし、直進(5秒間)
- 飛行制御をし、右旋回(7秒間)
- パラシュートでゆっくりと着地
- 飛行制御をし、直進(着地まで)
kotoni_jizen
【見どころ】
- パラフォイルで滑空するので、その着地予定地にBターゲットを置き、どこまで近づくことができるか(Aターゲットは無視)
- パラフォイルで、予定通りに飛行制御をすることができるか
- プローブの姿勢をセンサーで取得し、リアルタイムに姿勢を3D表示できるか
【実施結果】
- パラフォイルが開かず、自由落下してしまった。
- センサーは正常動作していたので、落下中の姿勢をパソコンで3D表示し再現することができた。
- プローブのロケットへの搭載準備が遅れ、他チームと順番を入れ替えたためペナルティがあり「当日の運用」の点数がマイナスになった。
「事後プレゼンテーション資料(未提出)」
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 16.6 |
| 事前準備 | 33.5 |
| 制作技術 | 17.5 |
| 当日の運用 | -3.5 |
| プレゼンテーション | 7.5 |
| Aミッション | 15.0 |
| 合計 | 86.2 |
審査コメント
- (3D姿勢表示プログラムは)事前に機体を回転させたりして取得したデータを元に、どのように動作するかをデモすると良いかもしれません。
実験の蓄積が力になっています。素晴らしいです。(植松)
- パラフォイル滑空を見られず、残念でした。粘り強いチャレンジを応援します。(永田)
- 毎年、プローブ作りの考え方や、技術が継承されているのは大変なことで、素晴らしいと思います。(安中)
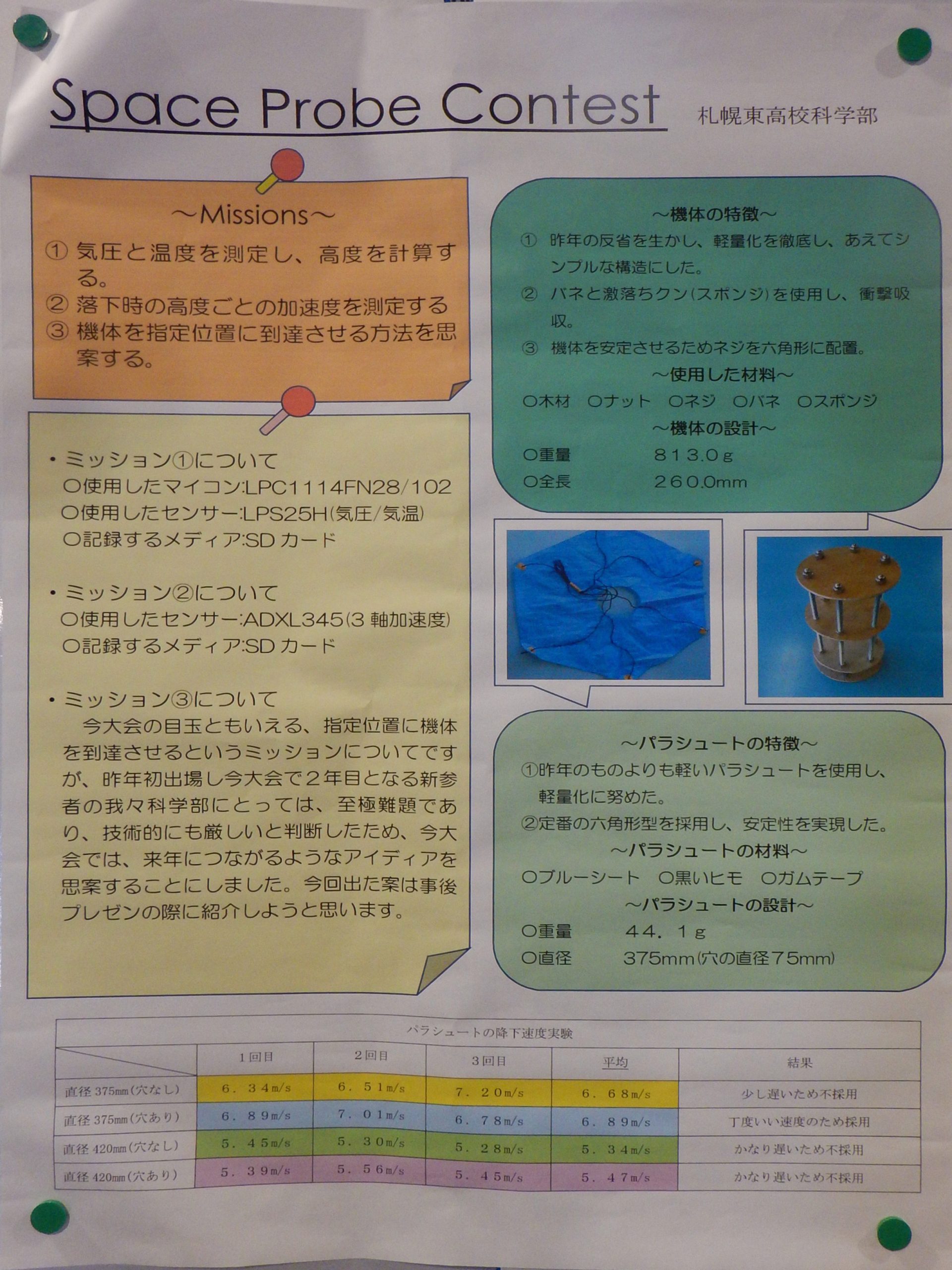
札幌東高校チーム
【期待する動作】
パラシュートで落下している最中に各種データを収集
- 地上約100mでロケットからプローブが放出される
- プローブはパラシュートを展開
- パラシュートでの降下中に、センサーで各種データ収集
- パラシュートでゆっくりと着地
sapporohigashi_jizen
【見どころ】
- 収集したデータをきちんと記録できるか(去年は着地時の衝撃でデータが壊れてしまったので、リベンジ)
着地ショック低減の工夫は有効に動作するか
今年はターゲット着地への制御は行わないので、そこは運任せ(風向きから落下位置を参加者が予想して配置する、Bターゲット頼み)。来年度に制御に挑戦。
【実施結果】
- パラシュートが開き、機体の損傷を防止できた
- 加速度データを記録することができた。
- 気圧データは前日にセンサを熱で破損した可能が高くデータを取得できなかった。
- ターゲットから大きく着地位置がずれ範囲外に着地したので、「着地の正確性」の項目の点数は0
「事後プレゼンテーション資料(未提出)」
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 0.0 |
| 事前準備 | 27.0 |
| 制作技術 | 15.7 |
| 当日の運用 | 9.0 |
| プレゼンテーション | 7.0 |
| Aミッション | 14.3 |
| 合計 | 73.0 |
審査コメント
- 機体のコントロールは来年とした、その割り切りは良いと思います。(過去の参加者が卒業し)0スタートとしては素晴らしい。(植松)
- 適切な課題設定と実直な取り組みを評価します。(永田)
- 基礎となるセンサーを動かすプログラムを作ったこと、実際に動作実証できたことはとても大きな一歩だと思います。来年も期待しています。(安中)
富良野緑峰高校チーム
【期待する動作】
パラシュートで落下している最中に位置を計測し、ターゲットの中心に落ちるようパラシュートを制御
- 地上のAターゲット(4個)の上に無線モジュールを置く
- 地上約100mでロケットからプローブが放出される
- プローブはパラシュートを展開
- パラシュートでの降下中に、Aターゲットに置いた4つ無線モジュールとの電波強度を測定
- 全ての無線モジュールの電波強度(≒距離)が同じになるように、飛行制御
- パラシュートでゆっくりと着地
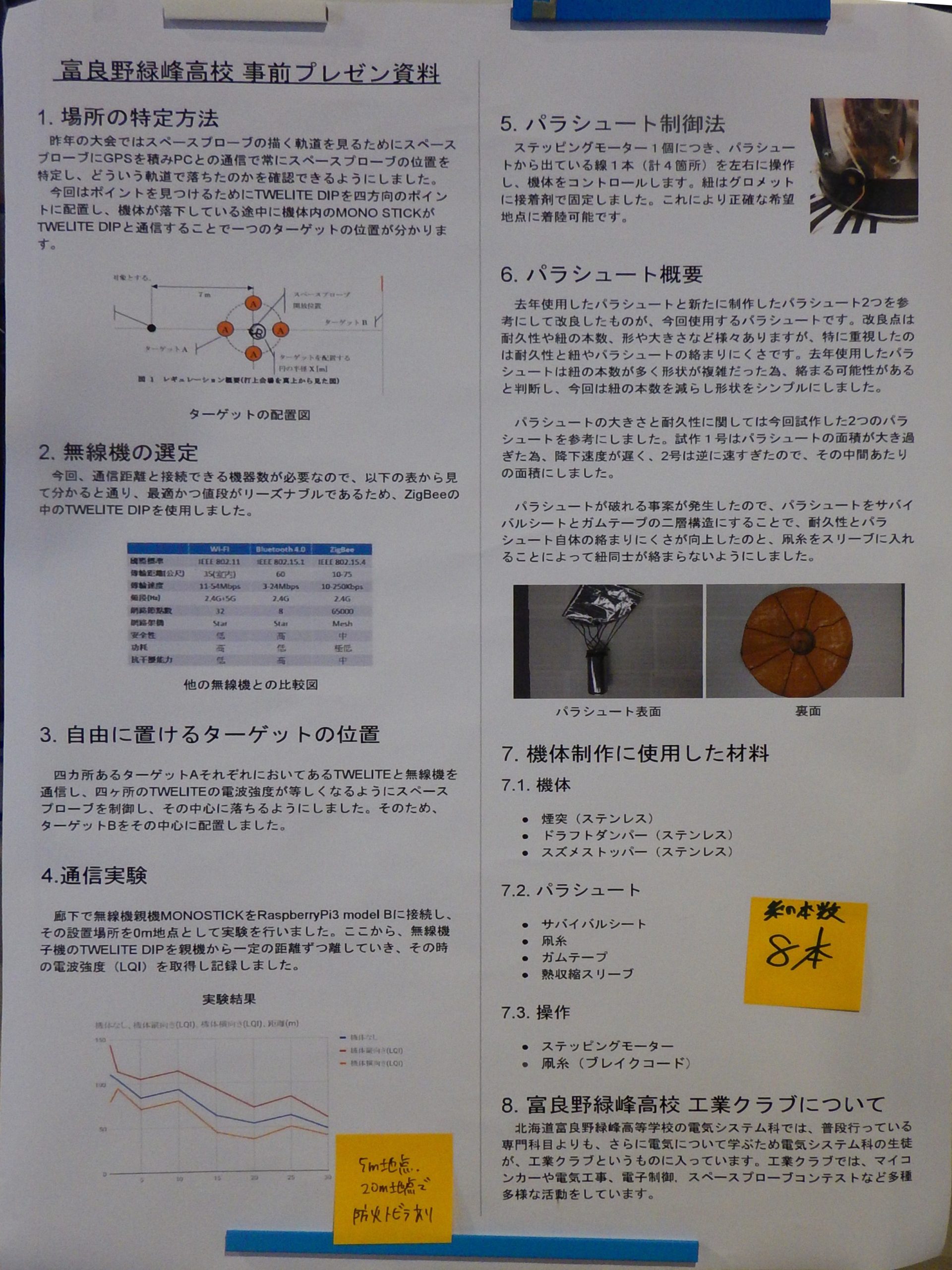
furanoryokuhou_jizen
【見どころ】
- 電波強度を利用した位置計測が動作するか
- パラシュートの紐での飛行制御が動作するか
【実施結果】
- パラシュートが開き、機体の損傷を防止できた
- 2/4個の無線モジュールの電波強度を記録することができた
- パラシュートの制御は、ステッピングモータの制御ソフト開発が間に合わず出来なかった
「事後プレゼンテーション資料(未提出)」
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 10.2 |
| 事前準備 | 21.5 |
| 制作技術 | 16.8 |
| 当日の運用 | 9.0 |
| プレゼンテーション | 6.0 |
| Aミッション | 14.0 |
| 合計 | 77.5 |
審査コメント
- 技術的な要素確認は時間が掛かるので、計画を立てて実験をするとよいと思います。(植松)
- 電波強度で距離を得るというのが独創的で面白かったです。(永田)
- IoT無線モジュールを使って、新しいアプローチにトライしたのは大変良いと思います。引き続き研究開発を続けてほしいと思います。(安中)
岩井チーム
【期待する動作】
プローブと、最寄りのターゲットへの方向と移動距離を推定し、プロペラとラダーで飛行制御を行う。
- 地上約100mでロケットからキャリアが放出される
- キャリアからプローブが放出される
- プローブはパラシュートを展開
- 空中でプローブの移動距離、ターゲットとの位置関係を推定
- 最寄りのターゲットに向け移動するように、プロペラとラダーで飛行制御
- パラシュートでゆっくりと着地
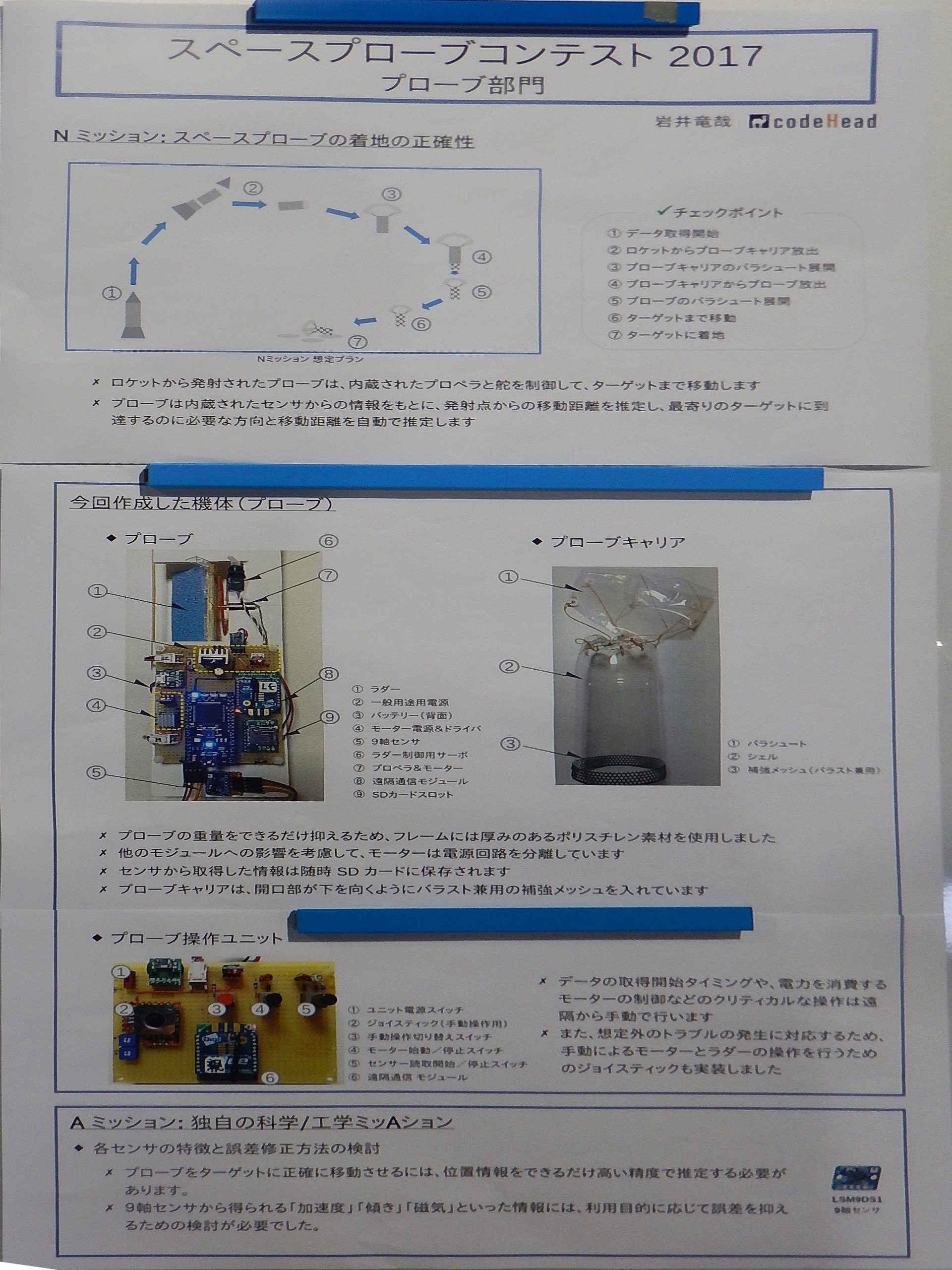
iwai_jizen
【見どころ】
- プロペラとラダーでの飛行制御がうまくいくか
- スペースプローブコンテスト初の社会人チーム
【実施結果】
- パラシュートが開き、飛行制御を開始することができた
- ターゲットへの飛行制御は、調整不足でうまくいかなかった(直前に地磁気センサのノイズ対策で金属のシールドケース追加し、重量増によるパラシュートサイズの調整などが間に合わなかった)
- ターゲットから大きく着地位置がずれ範囲外に着地したので、「着地の正確性」の項目の点数は0
事前プレゼンテーション資料
事前プレゼンテーション資料
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 0.0 |
| 事前準備 | 26.3 |
| 制作技術 | 20.0 |
| 当日の運用 | 9.0 |
| プレゼンテーション | 7.5 |
| Aミッション | 16.3 |
| 合計 | 79.2 |
審査コメント
- 社会人初参加、ありがとうございます。(植松)
- センシングの精度向上の取り組みが興味深かったです。ラダーによる推力方向制御はいいアイデアと思います。(永田)
- かなりの技術が必要なもの作りを実践されているのが素晴らしいです。次回、何が出てくるか楽しみです。(安中)
立命館慶祥高校チーム
【期待する動作】
プローブをドローンとし、手動操縦でターゲットに着地させる
- 地上約100mでロケットからプローブが放出される
- プローブはパラシュートを展開
- 姿勢の安定を待つ
- パラシュートをドローンから切り離す
- ドローンを手動操縦開始
- ドローンをターゲットに着地させる
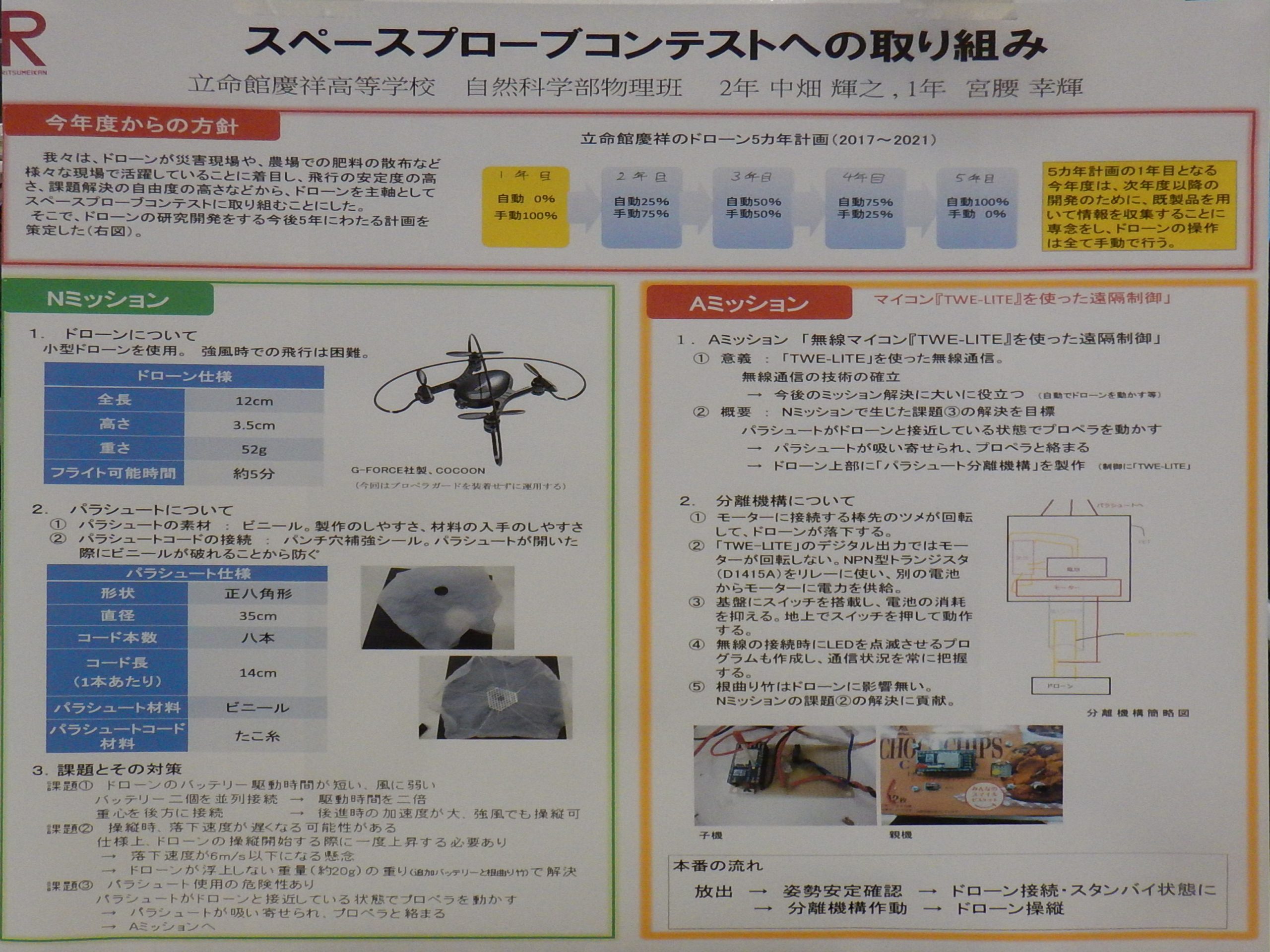
ritsumeikankeishou_jizen
【見どころ】
- ドローンとパラシュートの分離がうまくいくか
- スペースプローブコンテスト初のドローン機体。ターゲットが遠く操縦者から見えづらい環境で、ターゲットに着地させることができるか
【実施結果】
- 無線操作によるパラシュートとドローンの分離をすることができた
- ドローンの手動操縦はできなかった(スペック上の通信距離は30mだが、実際の距離はもっと離れていた。ドローン-コントローラ間の通信が確立できていたがは不明)
- 手動操作に限界を感じたので、次回は自律制御としたい
「事後プレゼンテーション資料(未提出)」
レーダーチャート

| 項目 | 点数 |
| 着地の正確性 | 11.5 |
| 事前準備 | 22.3 |
| 制作技術 | 14.7 |
| 当日の運用 | 9.0 |
| プレゼンテーション | 5.5 |
| Aミッション | 13.7 |
| 合計 | 76.7 |
審査コメント
- 理論やカタログスペックが必ずしも保証されていないので、まずは実験を積み重ねるのが大事です。そのためにももの作りをもっとやりましょう。(植松)
- ドローンのリリースが成功だっただけに、動作しなくて残念でした。長期計画とのことで、次回も期待しています。(永田)
- 頑張って作ったのが、伝わってくるプローブでした。少しづつ改良を続けて、完成度を高めてください。(安中)