スペースプローブコンテスト2019 プローブ部門の結果発表

最優秀賞
チーム岩井家

優秀賞
ZIPANGU

優秀賞
Cosmo Craft
金賞
札幌琴似工業高校
銀賞
富良野緑峰高校 工業クラブ
銀賞
筑波大学宇宙工学研究会
 スペースプローブコンテスト
プローブ部門とロケット部門があります
スペースプローブコンテスト
プローブ部門とロケット部門があります
スペースプローブコンテスト2019 プローブ部門の結果発表
最優秀賞
チーム岩井家
優秀賞
ZIPANGU
優秀賞
Cosmo Craft
金賞
札幌琴似工業高校
銀賞
富良野緑峰高校 工業クラブ
銀賞
筑波大学宇宙工学研究会
| 項目 | 数値 | 備考 |
|
外径 |
Φ150 mm |
突起物も含む |
|
全長 |
340 mm |
|
|
重量 |
1kg |
総重量 |
ロケットからの放出後、「プローブが安全に回収できること」、「競技会場の外へ飛び出さないこと」を目的とします。
ロケット打上をスムーズに行うこと、準備作業の遅延により他チームへ迷惑を掛けないことを目的とします。
※準備遅延により打上予定時刻を超過する場合、点数が減点されます。
安全に実験が出来る機体であることの判定を目的とします。
記載例は以下のファイルを参考にしてください。
テスト記事(稲石)
宇宙探査機(スペースプローブ)の惑星への着陸を想定し、以下のシーンを競技のベースとする。
これを考慮しつつ、競技性を高めた以下のミッションを実施し、達成度に応じて点数化する。
※2019年度以降は「アドバンスミッション」を廃止します。
2018年度までは「アドバンスミッション」を設定していましたが、事実上「ノミナルミッション実現のアイディア/オリジナリティの評価」となっていました。よって実情に合わせアドバンスミッションを廃止し、評価項目としての「オリジナリティ(アイディアの独創性,実現具合い)」に変更します(実質的に大きな変更はありません)。
GasCAMUIロケット(以下、ロケット)から放出されたスペースプローブを、規定時間内にターゲットまで移動させる。規定時間経過時の位置を計測し、点数を計算する。
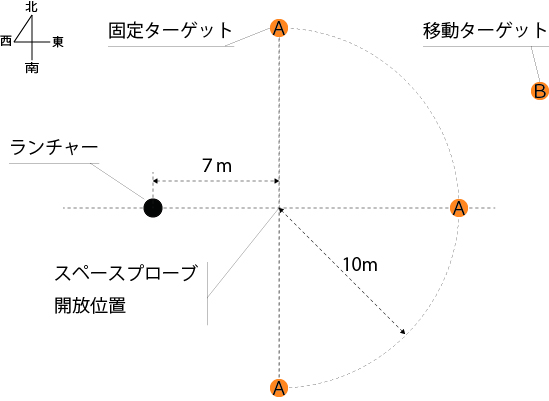
図 1 レギュレーション概要(打上会場を真上から見た図)
表 1 ターゲット位置に関する長さ一覧
|
項目 |
長さ[m] |
備考 |
|
ターゲットを配置する円の半径 |
10 |
|
|
ターゲット半径 |
1 |
参加チームがマーカー等を設置するのは自由 |
合計120点で採点する。
点数の配分を以下とする。
表 2 点数の配分
|
内訳 |
点数 |
点数の計算方法 |
|
1.着地の正確性 |
25 |
計算式:25‐(ターゲット中心~スペースプローブの距離(m) ) ※機体がターゲットの中心から25m以上離れた場合、計測をしない(0点となるため)。 |
|
2.事前準備/実験環境 |
35 |
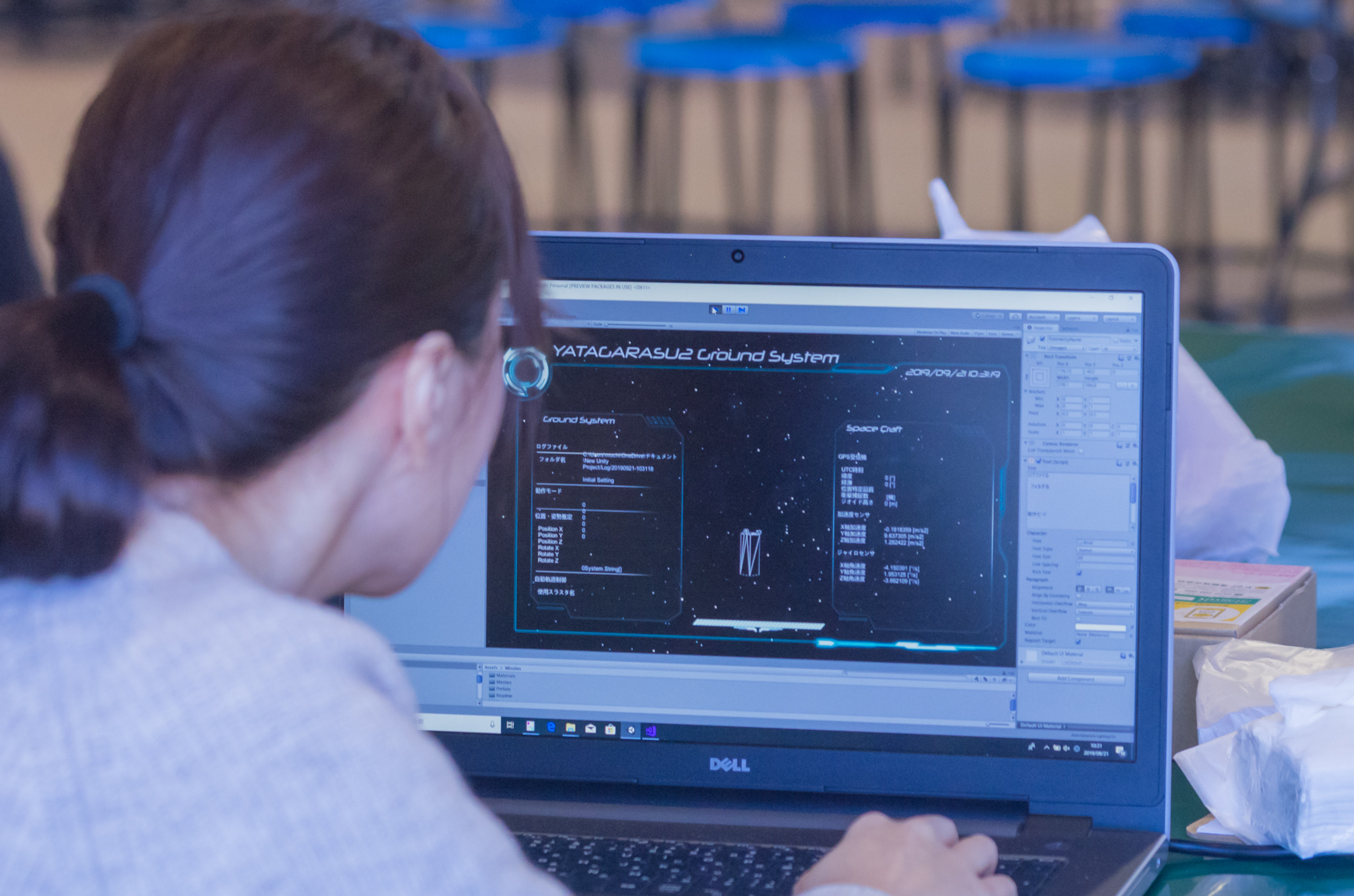
・事前の実験は十分か(課題と改善プロセスを説明) ・計測データの理解度、見やすくする仕組み(可視化など) |
|
3.制作技術 |
20 |
・メンテナンス性(バッテリー、記録メディア交換が簡単に できる。繰り返し実験ができる) ・機体の美しさ(機能美) |
|
4.大会当日の運用 |
10 |
・チェックリスト等による運用管理が出来ているか ・打上予定時刻超過によるペナルティ ※最大10点の減点 計算式:10‐打上予定時刻超過時間(分) |
|
5.プレゼンテーション |
10 |
・事前プレゼン資料に記載した予測数値と、実測値の差分検証の「妥当性」 |
|
6.オリジナリティ |
20 |
・ミッション実現のアイディアの独創性 ・アイディアの実現度合い |
| 合計 |
120 |
受付/機体のチェック後、スペースプローブの整備が可能です。
ここがスペースプローブの整備をする最後の場所です。整備完了後、ロケットにスペースプローブを搭載します。
※ロケットへの搭載後は、アクセスホールからしか操作できません。
※電池/記録メディアの消耗防止のため、ここでは「主電源ONし、スタンバイ状態」または「電源OFF状態」としてください(天候、他チームの準備遅延等により数十分以上待つ可能性が有り)
運営スタッフが整備場から射場までロケットを移動させ、打ち上げのためのランチャーへ搭載します(参加者がすることはありません)。
射場まで行く際は、必ずヘルメットを着用します(こちらで用意します)。
ランチャーに搭載されたロケットのアクセスホールから、スペースプローブを操作可能です。
ただしアクセスホールは小さいため、以下のどちらかの操作で「スタンバイ状態→動作開始」または「主電源ON(動作開始)」をしてください(無線操作も可能です)。
・アクセスホールから棒状のものを差し込み、スイッチを押す
・アクセスホールからタグ/紐を引き抜く(スペースプローブ搭載時にアクセスホールから、引き抜けるようにしておきます)
運営スタッフ、参加者全員が退避します。
運営スタッフにより打上可能かの安全確認を行います。
カウントダウン後、ロケットが打ち上がります。
上空100m程度でロケットのフェアリングが開き、スペースプローブが開放されます。
落下中のスペースプローブを、ターゲットを目掛けて制御します。
着地後、1分間だけスペースプローブは移動可能です。※地上で移動する機構がない場合、省略
運営スタッフにより、ロケットに近づいても問題ないかの安全確認を行います。
運営スタッフにより、ターゲットとスペースプローブの距離計測を行います。
参加者がスペースプローブを回収します。(回収後は事後プレゼン準備が可能です)
本大会には、参加者が実験を繰り返し行い創意工夫する過程を通し、考えて行動できる人になって欲しい、という目標があります。そのため当日の競技結果だけでなく、事前に準備/実験を繰り返してきた結果も考慮する配点とします。
以降の項目に基づき評価を行い、参加チームを順位付けします。また評価結果は将来の参加チームの助けとなるよう、公開します。
表3 評価用紙
|
# |
評価項目 |
配点 |
点数 |
|
着地の正確性[評価対象:競技結果] 25点 |
|||
|
1 |
計算式:25‐(ターゲット中心~スペースプローブの距離(m) ) ※最低 0点 |
25 |
|
|
事前準備/実験環境[評価対象:事前/事後プレゼン,データ解析用パソコン環境など] 35点 |
|||
|
2 |
実験を十分に行っているか(課題と改善プロセスの説明) |
15 |
|
|
3 |
計測データの理解(計測値の単位、地上と落下中の計測値の違い、時系列での数値変化の意味など) |
10 |
|
|
4 |
取得データを理解しやすくするための仕組み(可視化など) |
10 |
|
|
備考: |
|||
|
制作技術 [評価対象:スペースプローブ機体] 20点 |
|||
|
5 |
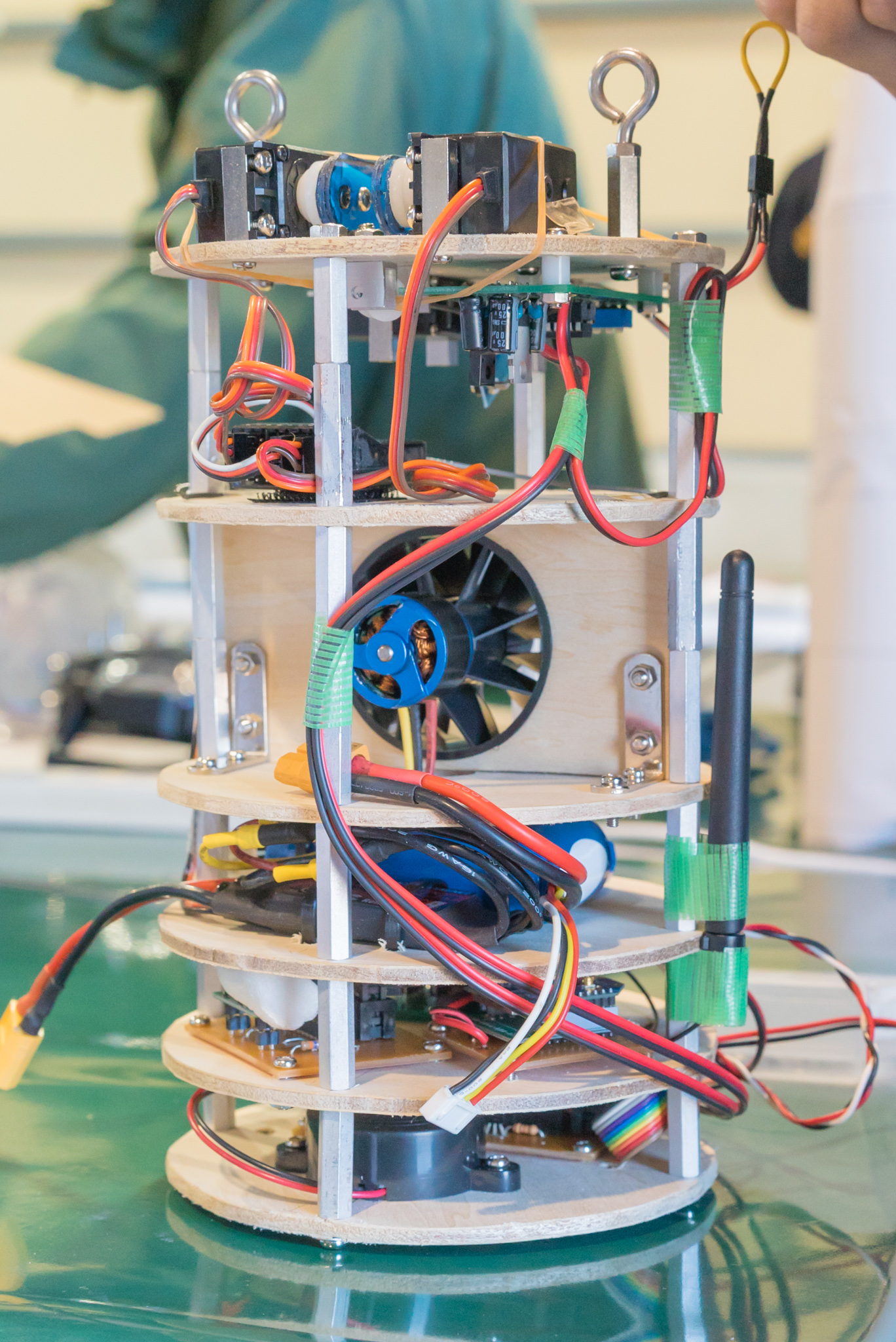
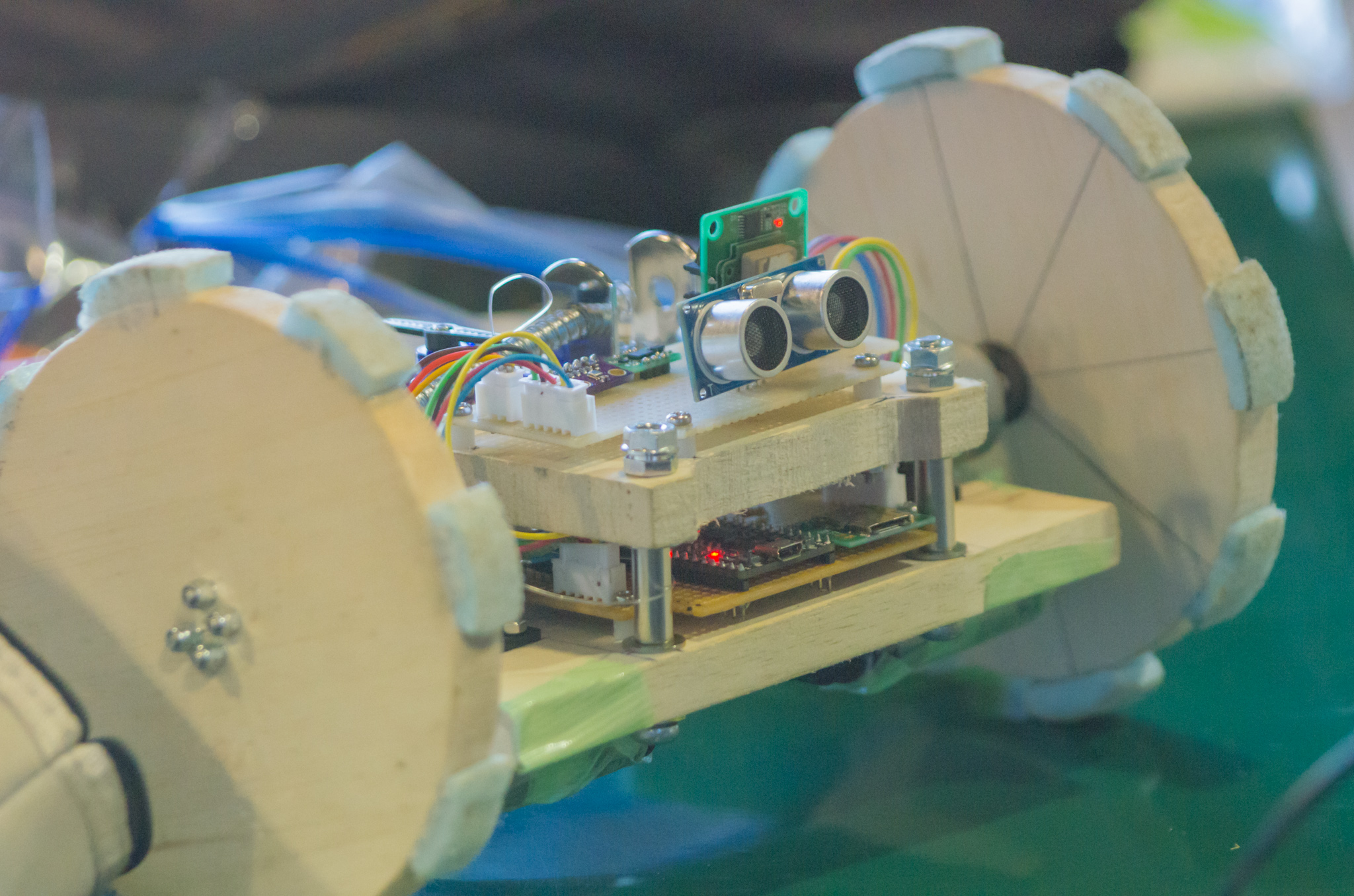
ミッション実現に対し適切な機構、センサーを選定しているか |
10 |
|
|
6 |
機体の美しさ(機能美) |
5 |
|
|
7 |
メンテナンス性(繰返し実験するためバッテリー、記録メディア交換が簡単にできる) |
5 |
|
|
備考: |
|||
|
大会当日の運用 [評価対象: 当日の競技までの準備作業の様子] 10点 |
|||
|
8 |
定刻で打上げるため、準備を漏れなく実施するための仕組み(チェックリスト等) |
10 |
|
|
9 |
打上予定時刻超過によるペナルティ。1分超過につき1点減点。 ※最大10点の減点 |
-10 |
|
|
備考: |
|||
|
プレゼンテーション [評価対象:事後プレゼン] 10点 |
|||
|
10 |
・実験結果を、(単位を理解し)数値を用いて伝えることが出来るか |
10 |
|
|
備考: |
|||
|
オリジナリティ [評価対象:事前/事後プレゼン,機体] 20点 |
|||
|
11 |
ミッション実現のアイディアの独創性(科学/工学的意義) |
5 |
|
|
12 |
アイディアの実現度合い |
15 |
|
|
備考: |
|||
2018年9月15日(水)に行われるスペースプローブコンテストのプローブ部門が
6件の枠に対して7件の応募があり、書類による審査をした結果、以下のチームに決定しました。
プローブ部門参加チーム
1、宇宙工房CosmoCraft
初めての本州からの応募です。東京から応募いただきました社会人チーム宇宙工房さん。
今回はスラスタを使った機体の制御でチャレンジしてくれます。
2、札幌琴似工業高校
毎年の常連校といえば琴似工業高校。この学校の凄いところはやはり歴代からの
技術継承。高校なので卒業はありますが、脈々と引き継がれ工夫され続ける様子は素晴らしいです。
今年も継続してパラフォイルでチャレンジです。
3、札幌東高校
今年で三年目の学校です。一年目の時、何をどうしたらいいのかわからない中でも
工夫して形にしてきたのが印象的で、そこから着実に出来ることが増えていっています。
今年はさらにドローンの制御もチャレンジするようです。
4、チーム岩井家
昨年、社会人募集の一年目から応募してくれた岩井家。家族で参加というある意味で
スペースプローブコンテストの理想の形です。昨年は実験環境不足に悩まされていましたが
今年は植松電機での試験も実施。当日が楽しみです。
5、チーム館山
ここも常連高校の立命館慶祥高校。チームのメンバー数が多いのも特徴。
昨年、上手くいかなかったドローンでの制御が今年どうなるか楽しみです。
6、富良野緑峰高校
今回の参加チームの中では一番ご近所からの参加。地元に近い高校からの参加は嬉しいです。
実験途中だった昨年を経て、今年はパラシュートの制御と完成度を高めてのチャレンジです。